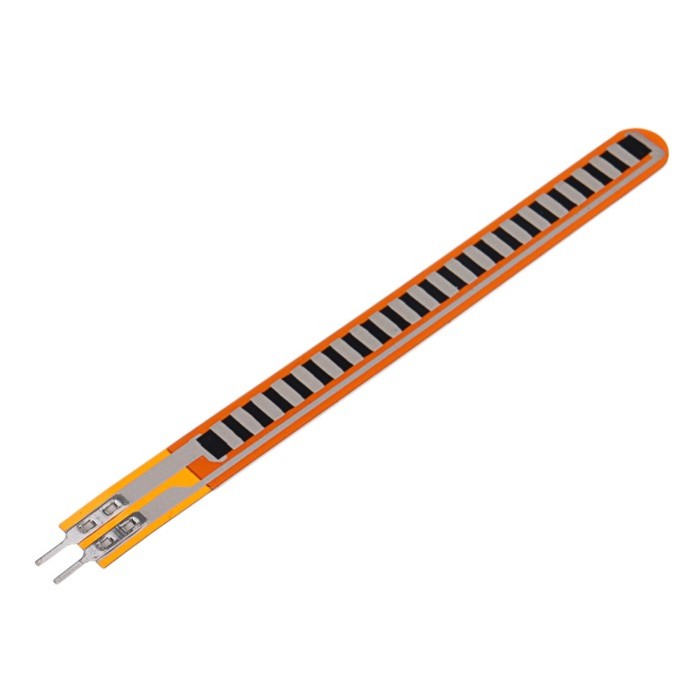





Flex Sensor 2.2″ Bend Sensor for Hand Gesture Recognition Good Quality
A flex sensor or bend sensor is a sensor that measures the amount of deflection or bending. Usually, the sensor is stuck to the surface, and resistance of sensor element is varied by bending the surface.
₹ 248 ₹349
349


A flex sensor is a type of sensor used to measure the amount of bending or flexing in a material or component. These sensors are often used in applications where the detection of bending or flexing is crucial, such as in robotics, wearable technology, and user interface devices.
Key Features:
-
Measurement Principle:
- Resistance Change: Flex sensors work on the principle of variable resistance. As the sensor bends, its resistance changes. This change in resistance is proportional to the amount of bending or flexing.
- Flexibility: The sensor itself is usually made of a flexible material, allowing it to bend along its length.
-
Construction:
- Flexible Substrate: The sensor consists of a flexible substrate that can be bent or flexed.
- Conductive Material: It has conductive material printed or coated on the substrate. This conductive material changes its resistance when bent.
- Terminals: Electrical terminals at the ends of the sensor allow it to be connected to a measurement system or microcontroller.
-
Output Type:
- Analog Output: Flex sensors typically provide an analog output where the resistance change due to bending is measured. This resistance change can be read as a voltage change when connected to a voltage divider circuit.
- Digital Output: Some flex sensors can be interfaced with an Analog-to-Digital Converter (ADC) to provide a digital representation of the bend angle or position.
Types of Flex Sensors:
-
Resistive Flex Sensors:
- Principle: These sensors have a variable resistor whose resistance changes with bending. The change in resistance is used to determine the angle of flexion.
- Applications: Commonly used in robotics, wearables, and control interfaces.
-
Capacitive Flex Sensors:
- Principle: These sensors use a capacitive measurement method where the capacitance between two conductive plates changes as the sensor bends.
- Applications: Less common but used in precision measurement applications.
Example of a Resistive Flex Sensor:
Specifications:
- Resistance: Typically ranges from 10kΩ to 100kΩ when not bent.
- Voltage Range: Usually operates within a range of 3V to 5V.
- Flexibility: Can bend up to a certain angle, often specified in the datasheet.
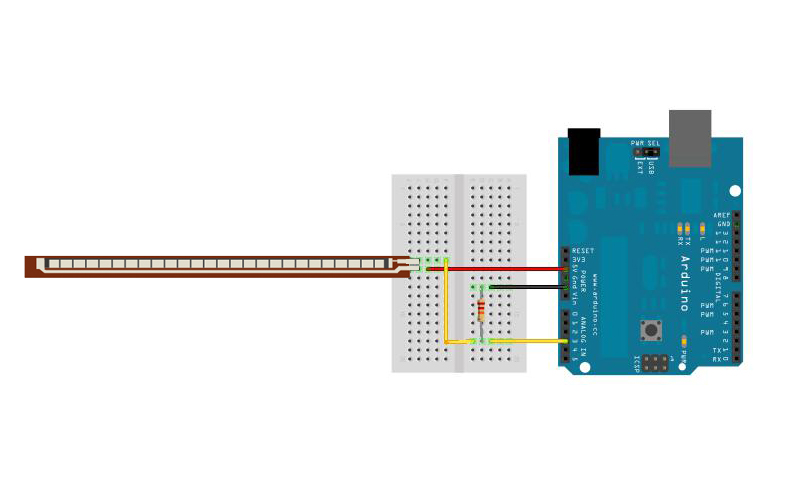
Wiring and Usage:
-
Wiring Diagram:
- Power Supply: Connects to a voltage source (e.g., 5V).
- Output Connection: The output is taken from a voltage divider circuit connected to the flex sensor.
// Pin definition
const int flexPin = A0; // Analog pin connected to the flex sensor
// Thresholds for gesture recognition
int flexReading = 0;
int flexThresholdLow = 300; // Threshold for low bend (e.g., relaxed hand)
int flexThresholdHigh = 700; // Threshold for high bend (e.g., full hand bend)
// Define hand gesture states
enum Gesture {
RELAXED,
BENT,
FULL_BEND
};
Gesture currentGesture = RELAXED; // Initialize to relaxed hand position
void setup() {
Serial.begin(9600); // Start serial communication
}
void loop() {
// Read the flex sensor value (voltage divider output)
flexReading = analogRead(flexPin);
// Print the raw sensor value to the serial monitor
Serial.print("Flex Sensor Reading: ");
Serial.println(flexReading);
// Determine hand gesture based on the flex sensor reading
if (flexReading < flexThresholdLow) {
currentGesture = RELAXED; // Hand is in a relaxed position
} else if (flexReading >= flexThresholdLow && flexReading < flexThresholdHigh) {
currentGesture = BENT; // Hand is partially bent
} else {
currentGesture = FULL_BEND; // Hand is fully bent (close fist)
}
// Output the detected gesture
switch (currentGesture) {
case RELAXED:
Serial.println("Gesture: Relaxed Hand");
break;
case BENT:
Serial.println("Gesture: Bent Hand");
break;
case FULL_BEND:
Serial.println("Gesture: Full Bend Hand");
break;
}
delay(100); // Delay for stability and serial printing
}
0 Reviews For this Product
Related Products











.jpg&width=225&quality=80)
